MIT6.S081(11)- Thread switching
Topic: more “under the hood” with xv6 Previously: system calls, interrupts, page tables, locks Today: process/thread switching
Why support multiple tasks?
Time-sharing: many users and/or many running programs. program structure: prime number sieve. parallel speedup on multi-core hardware.
Threads are an abstraction to simplify programming when there are many tasks. thread = an independent serial execution – registers, pc, stack the threading system interleaves the execution of multiple threads
Two main strategies:
multiple CPUs, each CPU runs a different thread each CPU “switches” between threads, runs one at a time
threads can share memory, or not xv6 kernel threads: they share kernel memory (thus locks) xv6 user processes: one thread per process, so no sharing linux: supports multiple threads sharing a user process’s memory
there are other techniques for interleaving multiple tasks
look up event-driven programming, or state machines
threads are not the most efficient, but they are usually the most convenient
Thread design challenges
-
How to interleave many threads on a few CPUs?
-
How to make interleaving transparent?
“scheduling” = the process of choosing which thread to run next
-
What to save while a thread isn’t running?
-
How to cope with compute-bound threads?
-
How to cope with compute-bound threads?
each CPU has timer hardware, which interrupts periodically kernel uses timer interrupts to grab control from looping threads kernel saves thread state, switches, eventually resumes, restores that saved state for transparency
RUNNING vs RUNNABLE
this is “pre-emptive” scheduling – a forced yield of unaware code as opposed to cooperative scheduling, in which code yields voluntarily
What to do with a thread that isn’t running?
We need to set aside its state: registers, stack, memory though no need to worry about memory, it won’t go anywhere so implementation provides each thread with a stack and register save area need to track status of each thread RUNNING vs RUNNABLE vs SLEEPING
in xv6:
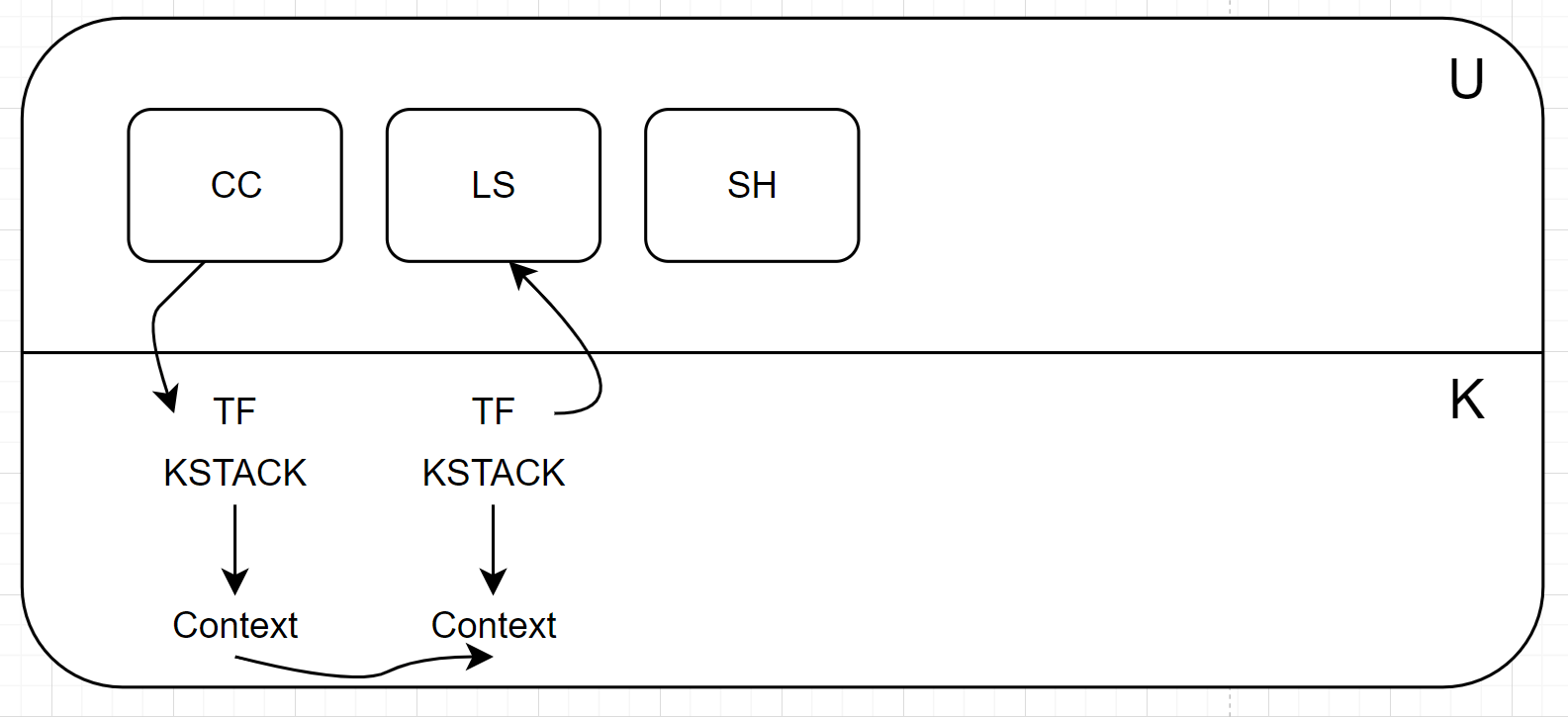
[simple diagram: processes, user stack, trapframe, kernel stack]
each process has two threads, one user, one kernel a process is either executing its user thread, or in a system call or interrupt in its kernel thread kernel threads share kernel memory / data structures thus the kernel is a parallel program we’ll use “process” and “kernel thread” and “thread” as synonyms
overview of thread switching in xv6
(the point: switch among threads to interleave many threads on each CPU)
TF = trapframe = saved user registers
CTX = context = saved RISC-V registers
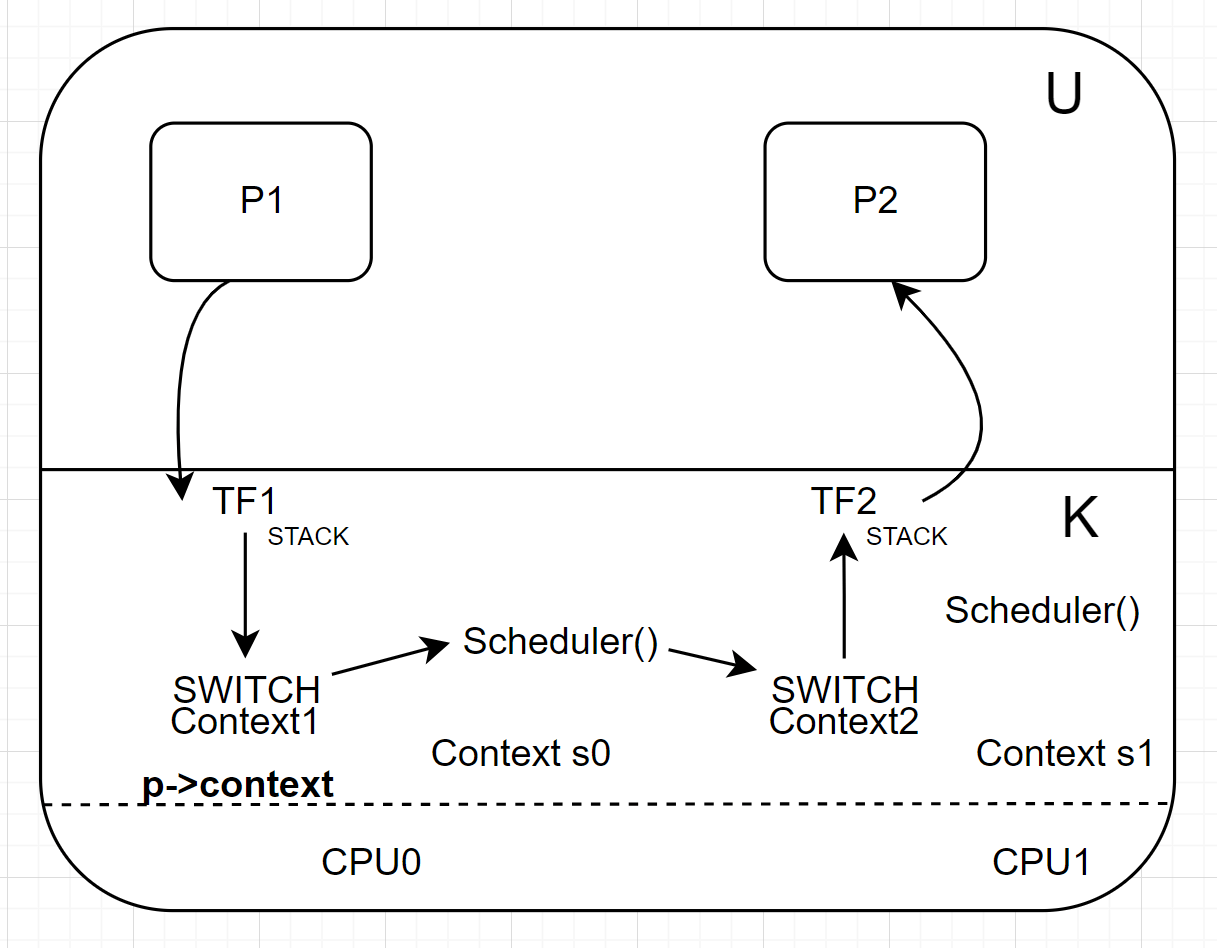
getting from one process to another involves multiple transitions:
-
user -> kernel; saves user registers in trapframe -
kernel thread -> scheduler thread; saves kernel thread registers in context -
scheduler thread -> kernel thread; restores kernel thread registers from ctx -
kernel -> user; restores user registers from trapframe
“context switch” – the switch from one thread to another
scheduler threads
There’s one per core; each has a stack and a struct context kernel threads (processes) always switch to the current core’s scheduler thread which switches to another kernel thread, if one is RUNNABLE there are never direct kernel thread to kernel thread switches the reason: the scheduler’s separate stack simplifies cases like switching away from an exiting process the scheduler thread keeps scanning the process table until it finds a RUNNABLE thread (there may not be one!) if there is not RUNNABLE thread, the scheduler is “idle”
note: each core is either running its scheduler thread, or some other thread a given core runs only one thread at a time each thread is either running on exactly one core, or its registers are saved in its context if a thread isn’t running, its saved context refers to a call to swtch()
struct proc in proc.h p->trapframe holds saved user thread’s registers p->context holds saved kernel thread’s registers p->kstack points to the thread’s kernel stack p->state is RUNNING, RUNNABLE, SLEEPING, &c p->lock protects p->state (and other things…)
Code
pre-emptive switch demonstration user/spin.c – two CPU-bound processes my qemu has only one CPU let’s watch xv6 switch between them
make qemu-gdb
gdb
(gdb) c
show user/spin.c
spin
you can see that they alternate, despite running continuously. xv6 is switching its one CPU between the two processes. how does the switching work?
I’m going to cause a break-point at the timer interrupt.
(gdb) b trap.c:207
(gdb) c
(gdb) finish
(gdb) where
we’re in usertrap(), handling a device interrupt from the timer
(timerinit() in kernel/start.c configures the RISC-V timer hardware).
what was running when the timer interrupt happened?
(gdb) print p->name
(gdb) print p->pid
(gdb) print/x *(p->trapframe)
(gdb) print/x p->trapframe->epc
let’s look for the saved epc in user/spin.asm timer interrupted user code in the increment loop, no surprise
(gdb) step ... into yield() in proc.c
(gdb) next
(gdb) print p->state
change p->state from RUNNING to RUNNABLE -> give up CPU but want to run again.
note: yield() acquires p->lock
since modifying p->state
and to prevent another CPU from running this RUNNABLE thread!
(gdb) next 2
(gdb) step (into sched())
sched() makes some sanity checks, then calls swtch()
(gdb) next 7
this is the context switch from a process’s kernel thread to the scheduler thread
swtch will save the current RISC-V registers in first argument (p->context)
and restore previously-saved registers from 2nd argument (c->context)
let’s see what register values swtch() will restore
(gdb) print/x cpus[0].context
where is cpus[0].context.ra?
i.e. where will swtch() return to?
kernel.asm says it’s in the scheduler() function in proc.c
(gdb) tbreak swtch
(gdb) c
we’re in kernel/swtch.S
a0 is the first argument, p->context
a1 is the second argument, cpus[0].context
swtch() saves current registers in xx(a0) (p->context)
swtch() then restores registers from xx(a1) (cpus[0].context)
then swtch returns
Q: swtch() neither saves nor restores $pc (program counter)! so how does it know where to start executing in the target thread?
Q: why does swtch() save only 14 registers (ra, sp, s0..s11)? the RISC-V has 32 registers – what about the other 18? zero, gp, tp t0-t6, a0-a7 note we’re talking about kernel thread registers all 32 user register have already been saved in the trapframe
registers at start of swtch:
(gdb) print $pc -- swtch
(gdb) print $ra -- sched
(gdb) print $sp
registers at end of swtch:
(gdb) stepi 28 -- until ret
(gdb) print $pc -- swtch
(gdb) print $ra -- scheduler
(gdb) print $sp -- stack0+??? -- entry.S set this up at boot
(gdb) where
(gdb) stepi
we’re in scheduler() now, in the “scheduler thread”,
on the scheduler’s stack
scheduler() just returned from a call to swtch()
it made that call a while ago, to switch to our process’s kernel thread
that previous call saved scheduler()’s registers
our processes’s call to swtch() restored scheduler()’s saved registers
p here refers to the interrupted process
(gdb) print p->name
(gdb) print p->pid
(gdb) print p->state
remember yield() acquired the process’s lock
now scheduler releases it
the scheduler() code looks like an ordinary acquire/release pair
but in fact scheduler acquires, yield releases
then yield acquires, scheduler releases
unusual: the lock is released by a different thread than acquired it!
Q: why hold p->lock across swtch()?
yield() acquires
scheduler() releases
could we release p->lock just before calling swtch()?
p->lock protects a few things: makes these steps atomic:
- p->state=RUNNABLE
- save registers in p->context
- stop using p’s kernel stack
so other CPU’s scheduler won’t start running p until all steps complete
makes these steps atomic and uninterruptable:
- p->state=RUNNING
- move registers from context to RISC-V registers
so an interrupt won’t yield() and save not-yet-initialized
RISC-V registers in context.
scheduler()’s loop looks at all processes, finds one that’s RUNNABLE keeps looping until it finds something – may be idle for a while in this demo, will find the other spin process let’s fast-forward to when scheduler() finds a RUNNABLE process
(gdb) tbreak proc.c:474
(gdb) c
scheduler() locked the new process, then set state to RUNNING now another CPUs’ scheduler won’t run it
it’s the other “spin” process:
(gdb) print p->name
(gdb) print p->pid
(gdb) print p->state
let’s see where the new thread will start executing after swtch() by looking at $ra (return address) in its context
(gdb) print/x p->context
(gdb) x/4i p->context->ra
new thread will return into sched()
look at kernel/swtch.S (again)
(gdb) tbreak swtch
(gdb) c
(gdb) stepi 28 -- now just about to execute swtch()'s ret
(gdb) print $ra
(gdb) where
now we’re in a timer interrupt in the other spin process
in the past it was interrupted, called yield() / sched() / swtch()
but now it will resume, and return to user space
note: only swtch() writes contexts (except for initialization)
only sched() and scheduler() call swtch()
so for a kernel thread, context.ra always points into sched()
and for a scheduler thread, context.ra always points into scheduler()
note: sched() calls swtch() – then swtch() returns to sched()
but it’s typically a different thread returning
sched() and scheduler() are “co-routines”
each knows what it is swtch()ing to
each knows where swtch() return is coming from
e.g. yield() and scheduler() cooperate about p->lock and p->state
different from ordinary thread switching, where neither
party typically knows which thread comes before/after
Q: what is the “scheduling policy”?
i.e. how does xv6 decide what to run next if multiple threads are RUNNABLE? is it a good policy?
Q: is there pre-emptive scheduling of kernel threads?
yes – timer interrupt and yield() can occur while in kernel.
yield() called by kerneltrap() in kernel/trap.c
where to save registers of interrupted kernel code?
not in p->trapframe, since already has user registers.
not in p->context, since we’re about to call yield() and swtch()
kernelvec.S pushes them on the kernel stack (since already in kernel).
is pre-emption in the kernel useful?
not critical in xv6.
valuable if some system calls have lots of compute.
or if we need a strict notion of thread priority.
Q: why does scheduler() briefly enable interrupts, with intr_on()?
There may be no RUNNABLE threads They may all be waiting for I/O, e.g. disk or console Enable interrupts so device has a chance to signal completion and thus wake up a thread Otherwise, system will freeze
Q: why does sched() forbid locks from being held when yielding the CPU?
(other than p->lock) i.e. sched() checks that noff == 1 suppose process P1 holding lock L1, yields CPU process P2 runs, tries acquire(L1) P2’s acquire spins with interrupts turned off so timer interrupts won’t occur so P2 won’t yield the CPU so P1 can’t execute so P1 won’t release L1, ever
Q: can we get rid of the separate per-cpu scheduler thread?
could sched() directly swtch() to a new thread?
so that sched() looks for next process to run?
that would be faster – avoids one of the swtch() calls
yes – but:
scheduling loop would run on a thread’s kernel stack
what if that thread is exiting?
what if another cpu wants to run the thread?
what if there are fewer threads than CPUs – i.e. too few stacks?
can be dealt with – give it a try!
Summary
xv6 provides a convenient thread model for kernel code pre-emptive via timer interrupts transparent via switching registers and stack multi-core requires careful handling of stacks, locks next lecture: mechanisms for threads to wait for each other
Lab: Multithreading
Uthread: switching between threads (moderate)
设计并实现用户级线程系统的上下文切换机制。xv6系统中提供了两个文件:uthread.c 和 uthread_switch.S,以及一个用于构建 uthread 程序的Makefile规则。uthread.c 包含了一个基本的用户级线程包以及三个测试线程的代码,但缺少创建线程和线程切换的部分代码。
任务要求包括:
- 实现线程创建和上下文切换的代码。
- 在线程第一次运行时,确保执行创建时传递的函数,并使用该线程的栈。
- 实现
thread_switch来保存当前线程的寄存器,并恢复下一个线程的寄存器,以继续其执行。
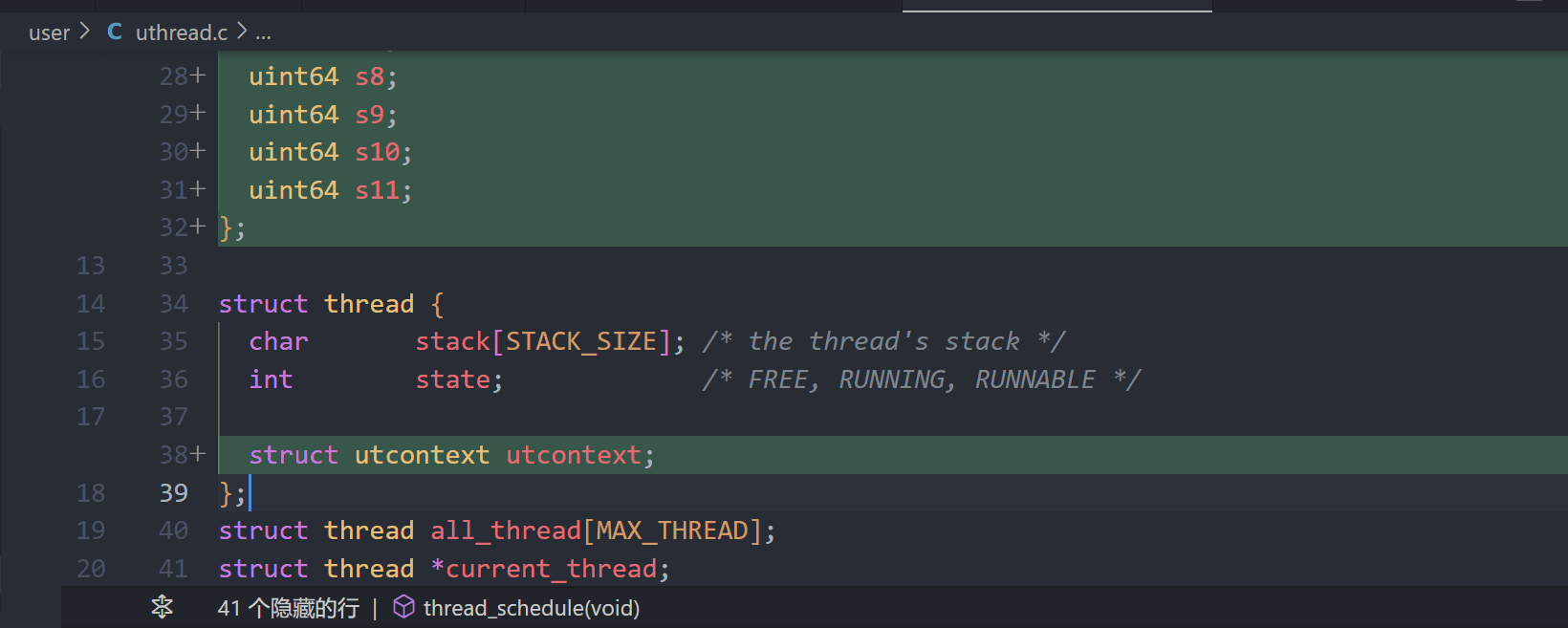
1.添加utcontext结构体
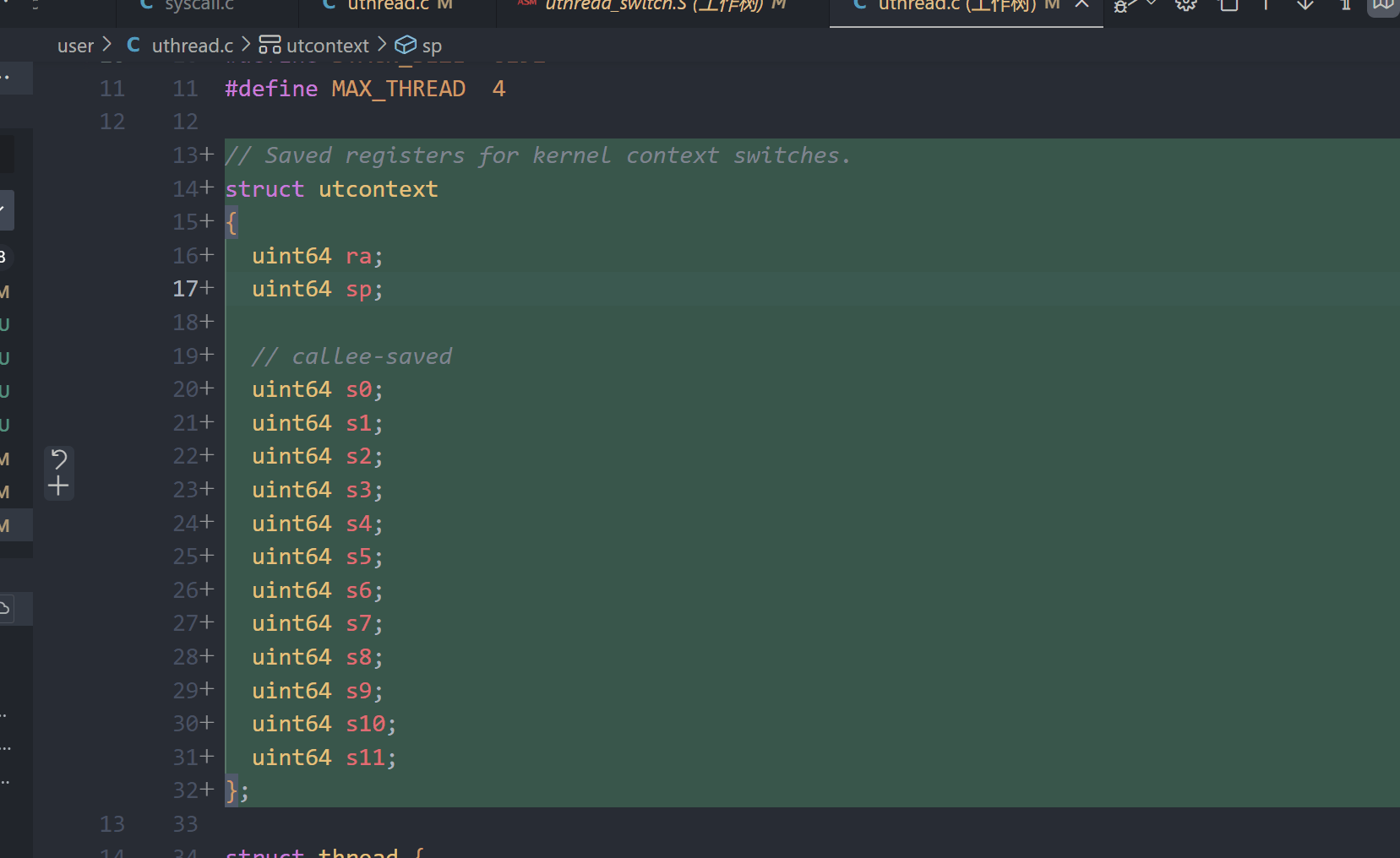
2.添加utcontext字段
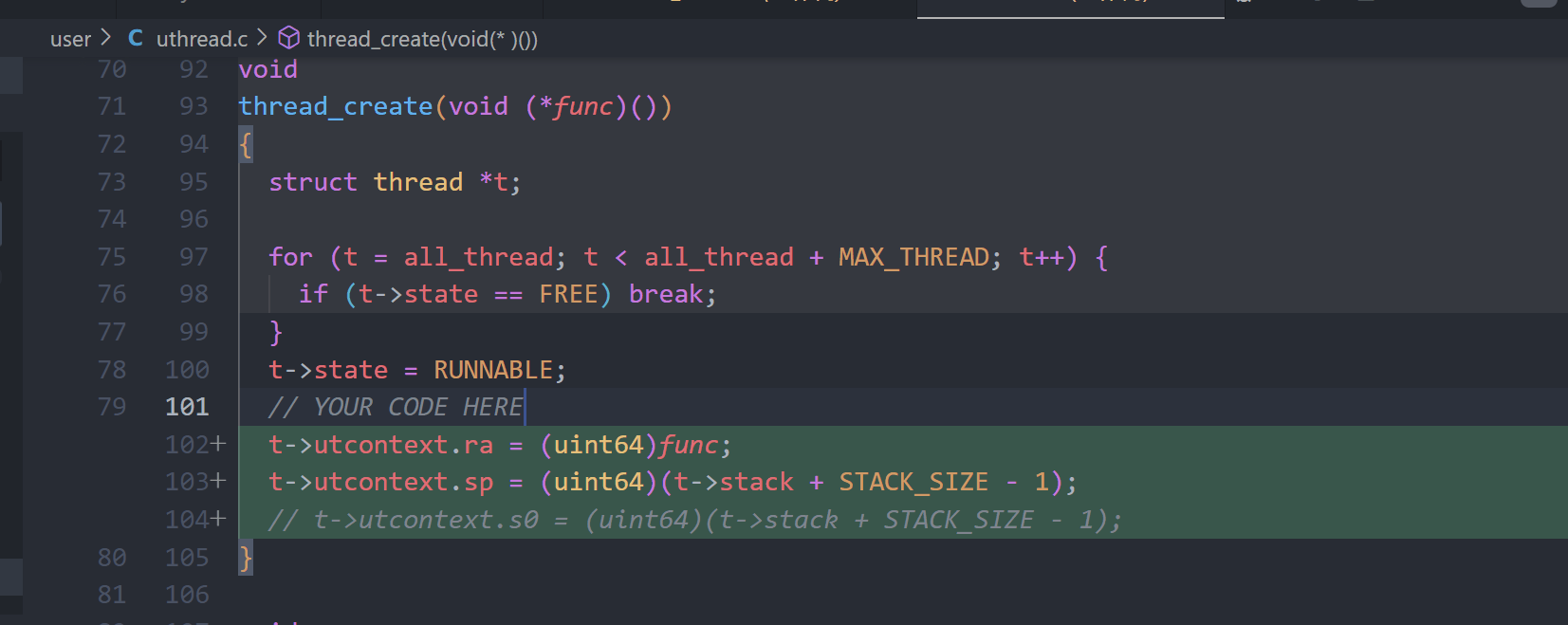
thread_create中保存ra和sp
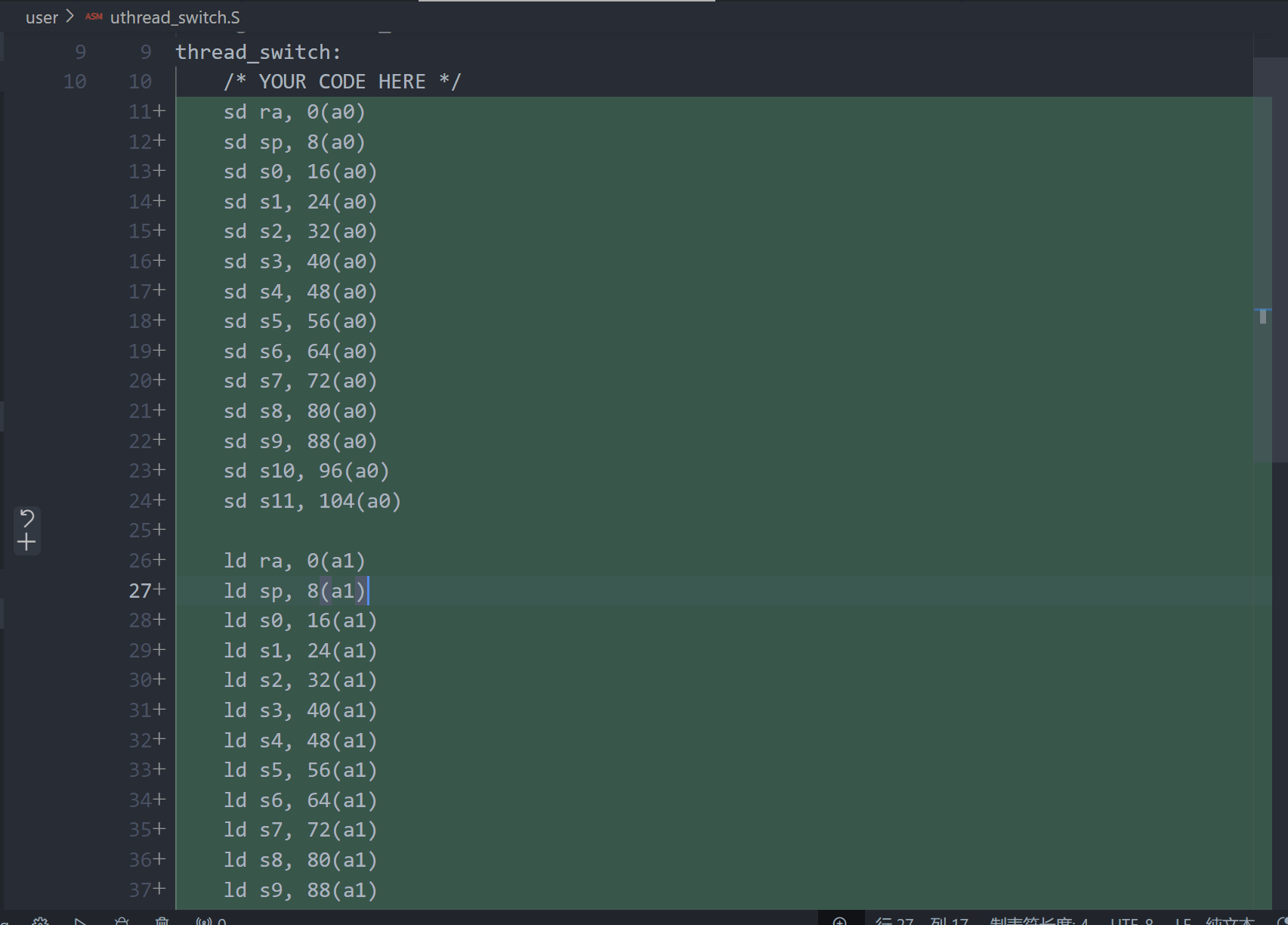
4.补全uthread_switch.S, 完全参照swtch.S
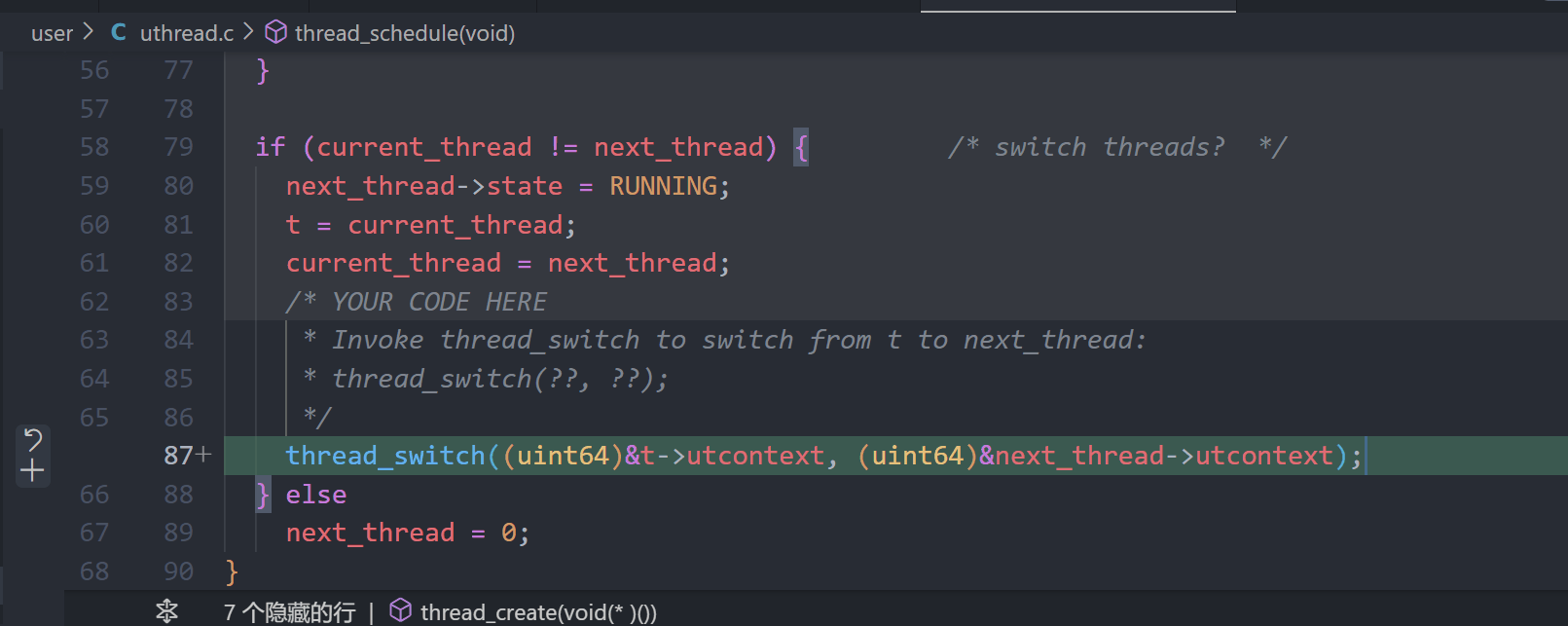
5.调用thread_switch,调用 thread_switch 切换上下文,传递当前线程和下一个线程的上下文, 注意这里上下文切换需要在最后实现,因为这会影响next_thread, 所以一定要在更新current_thread之后调用thread_switch。
Using threads (moderate)
目标:实现线程并行编程,使用pthread库在多线程环境下操作哈希表,并确保其线程安全。
任务环境:在支持多核的真实Linux或MacOS计算机上完成,不使用xv6或qemu。
初始问题:提供的哈希表仅在单线程情况下正确,多线程环境下会有缺失键的问题。
步骤:
- 使用
pthread库对哈希表进行并发操作。 - 运行测试
ph 1和ph 2,观察不同线程下的插入和获取性能。 - 分析缺失键出现的原因,提交解释(sequence of events)。
解决方案:在put()和get()函数中添加锁机制,确保多线程操作时没有键丢失。
- 使用
pthread_mutex_t相关函数实现加锁和解锁。 - 修改代码,通过测试
ph_safe,确保两线程下无键丢失。
进一步优化:尝试在某些情况下允许并行插入操作,例如使用每个哈希桶(bucket)一个锁,以提高性能。
- 修改代码,使其通过
ph_safe和ph_fast测试,要求双线程至少达到单线程1.25倍的插入速度。
1.定义锁, 定义全局锁可以保证多线程情况下不会丢失key, 为每一个桶加锁可以在保证不丢失key的情况下保证性能
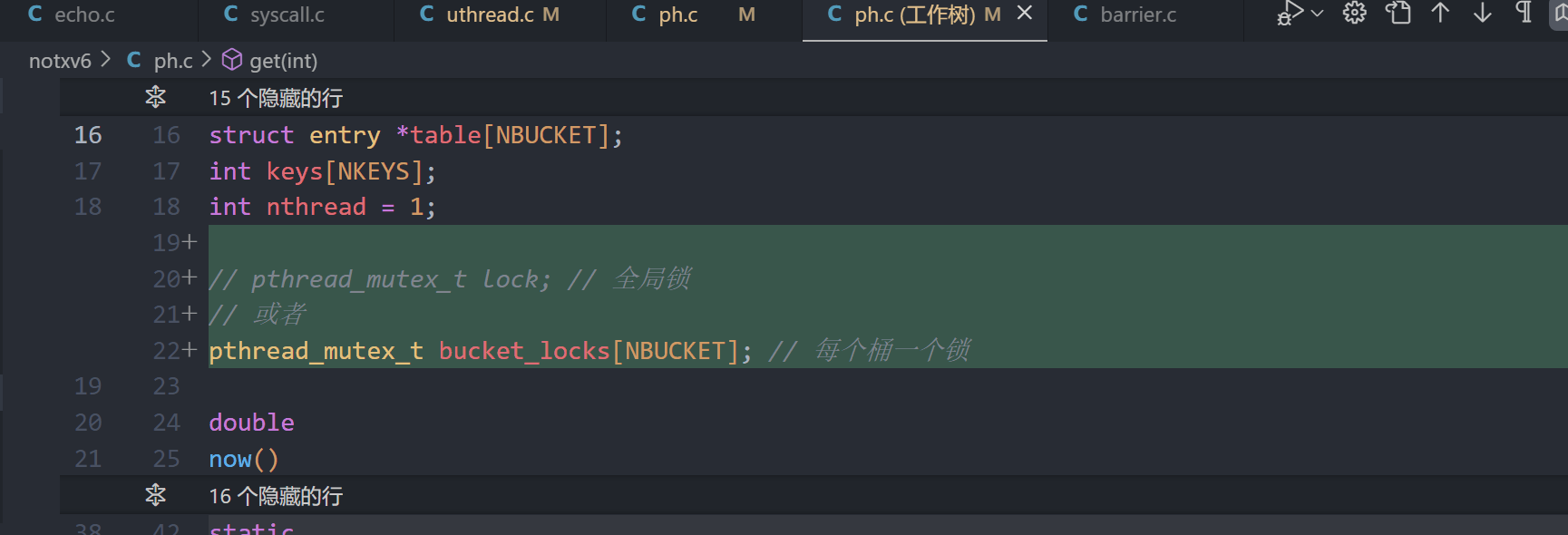
2.初始化锁
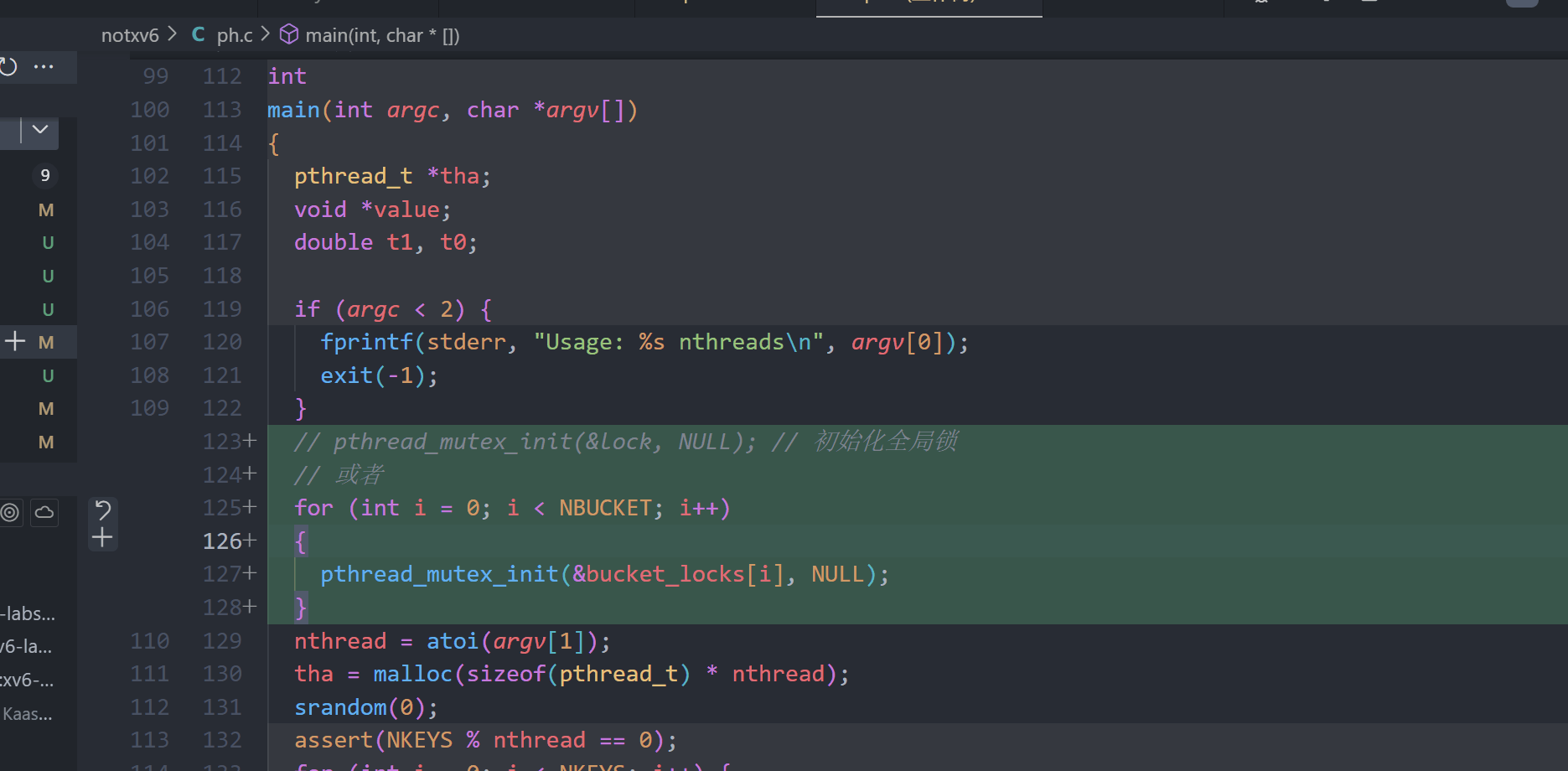
3.在put()和get()中加锁以及解锁
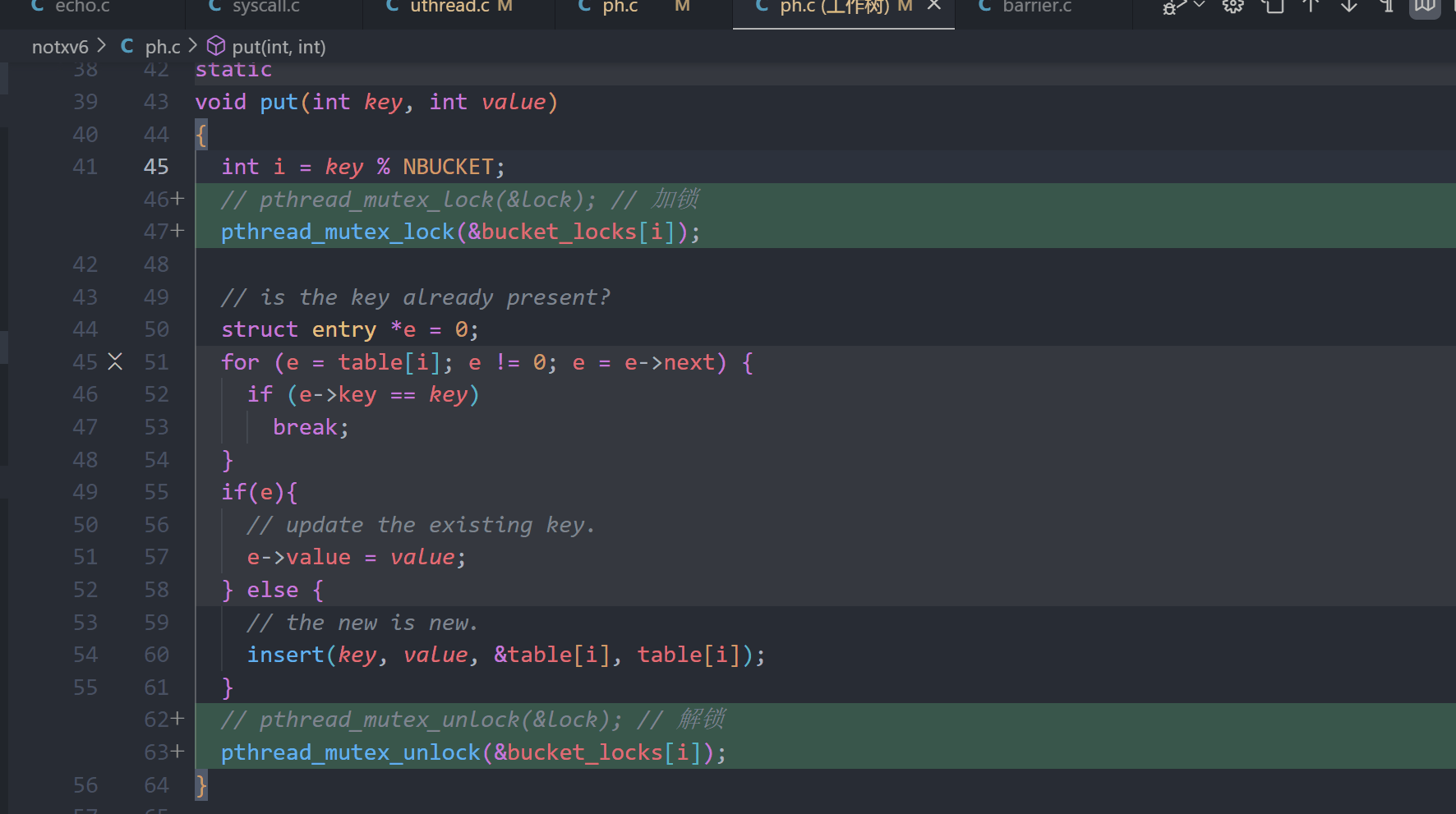
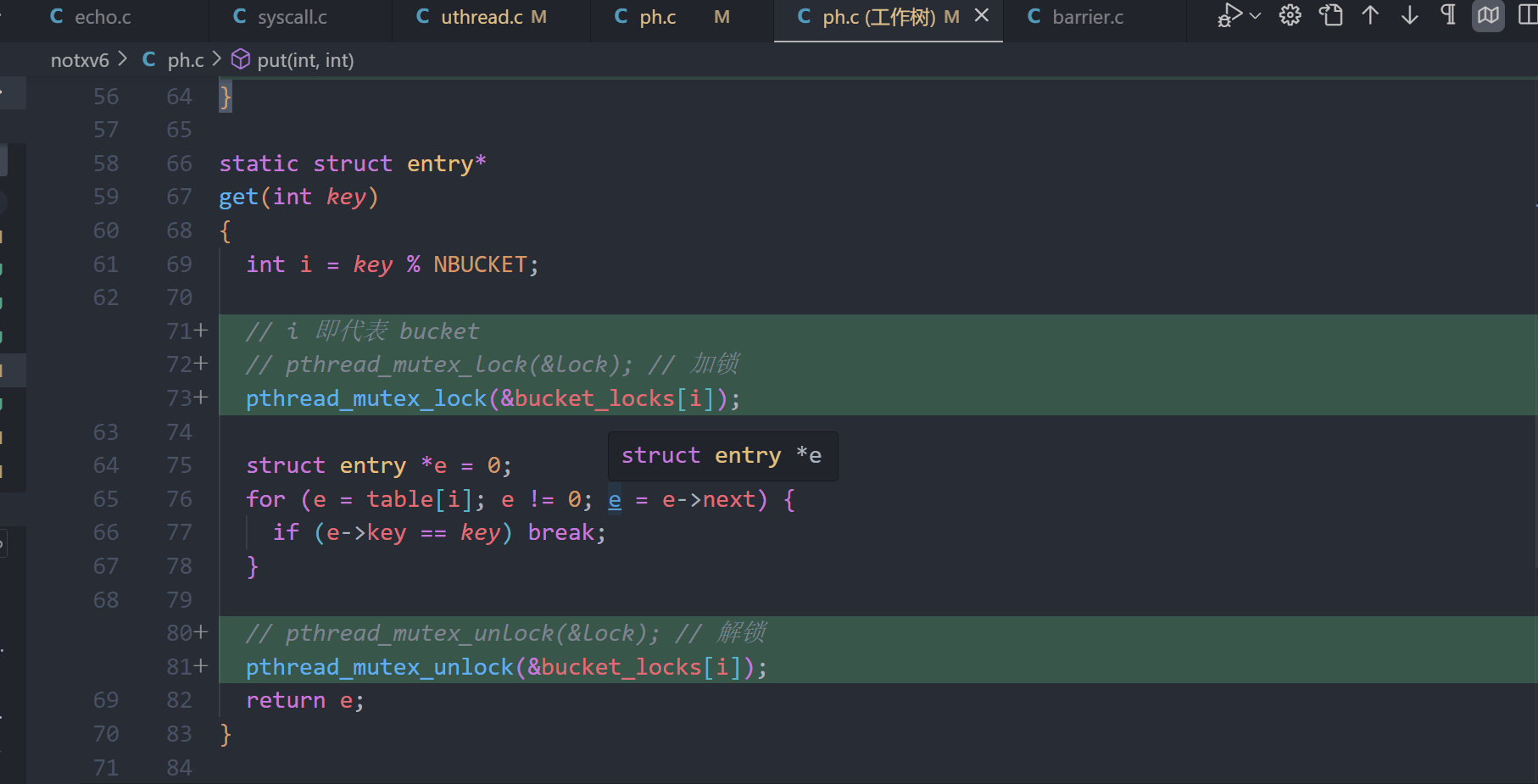
Barrier(moderate)
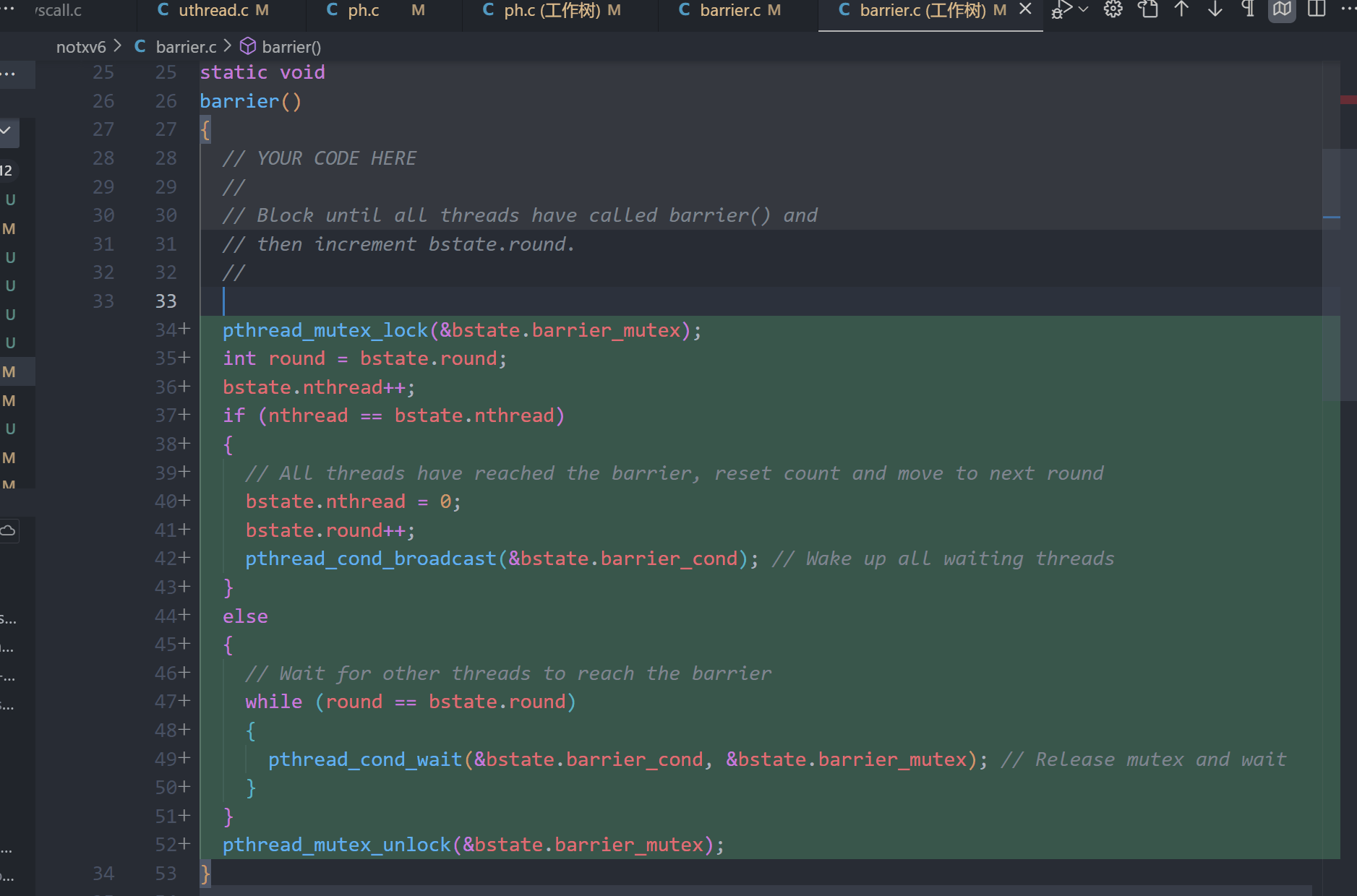
实现一个线程屏障(barrier),即所有线程在同一点等待,直到所有线程都到达该点后再继续。需要使用 pthread 的条件变量 (pthread_cond_wait 和 pthread_cond_broadcast) 来协调线程。任务是在 barrier.c 中修复已存在的问题,确保所有线程在调用 barrier() 时都被阻塞,直到全部线程到达。
关键要求:
- 使用条件变量实现线程同步。
- 处理多次循环中的屏障调用,每次屏障都代表一个“回合”。
- 避免一个线程快速离开屏障并影响其他线程。
- 确保解决断言错误并通过测试。
在每一个thread中调用barrier, 记录所有到达的thread数量, 如果数量等于设置的线程数,则开始下一round,否则将此线程执行此操作 :
pthread_cond_wait(&bstate.barrier_cond, &bstate.barrier_mutex); // Release mutex and wait
保证该线程处于等待状态,等待所有线程都完成此round。